 くのへスタジオ
くのへスタジオ こんにちは、くのへ@MasazaneKunoheです。
金曜日のIT/電子工作DIYシリーズ。
今日はとても変態的な動きをする「テオヤンセン機構」です。
テオヤンセン機構とは
オランダの芸術家であるTheo Jansenさんが作ったリンク機構です。
テオヤンセンさんはこちら(WikiPediaから引用)

笑顔が素敵😃
テオヤンセンさんの「ストランドビースト」という作品が有名で、風力で動くモンスターは圧巻の一言です!!
これの足に当たる部分がテオヤンセン機構と呼ばれるリンク機構です。
テオヤンセン機構の作り方
テオヤンセン機構の作り方って、あまりネットで見つからないような気がします。
今日はAlgodooで作ってみます
まず、こんな感じで部品を作ります。数値は長さの比です。
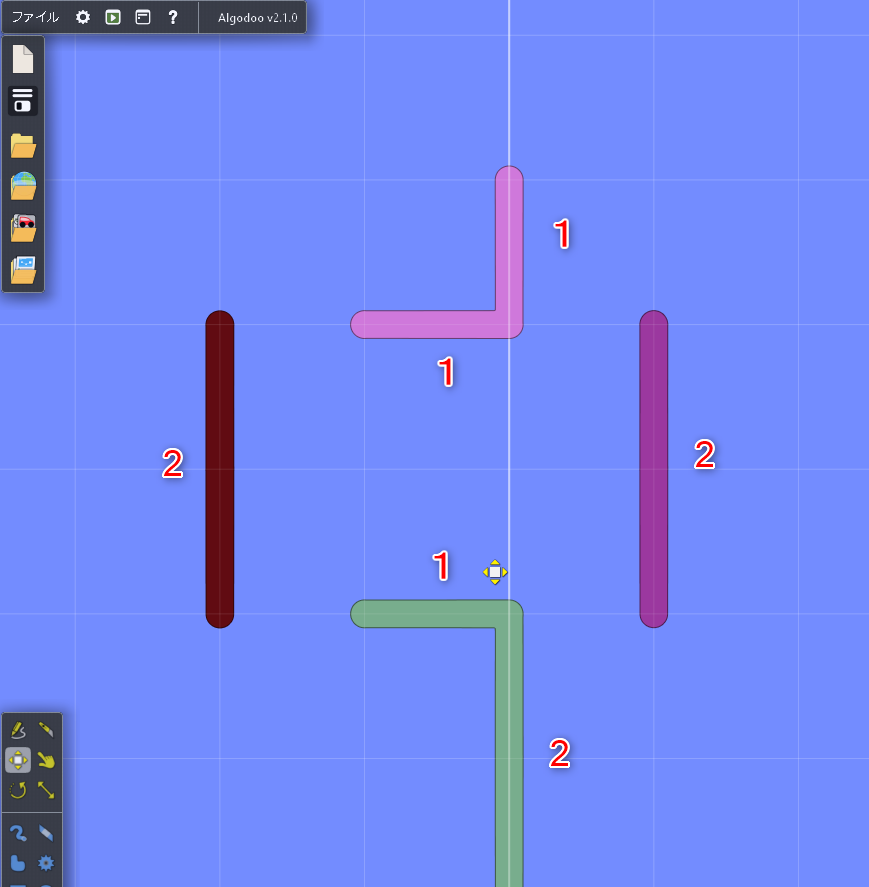
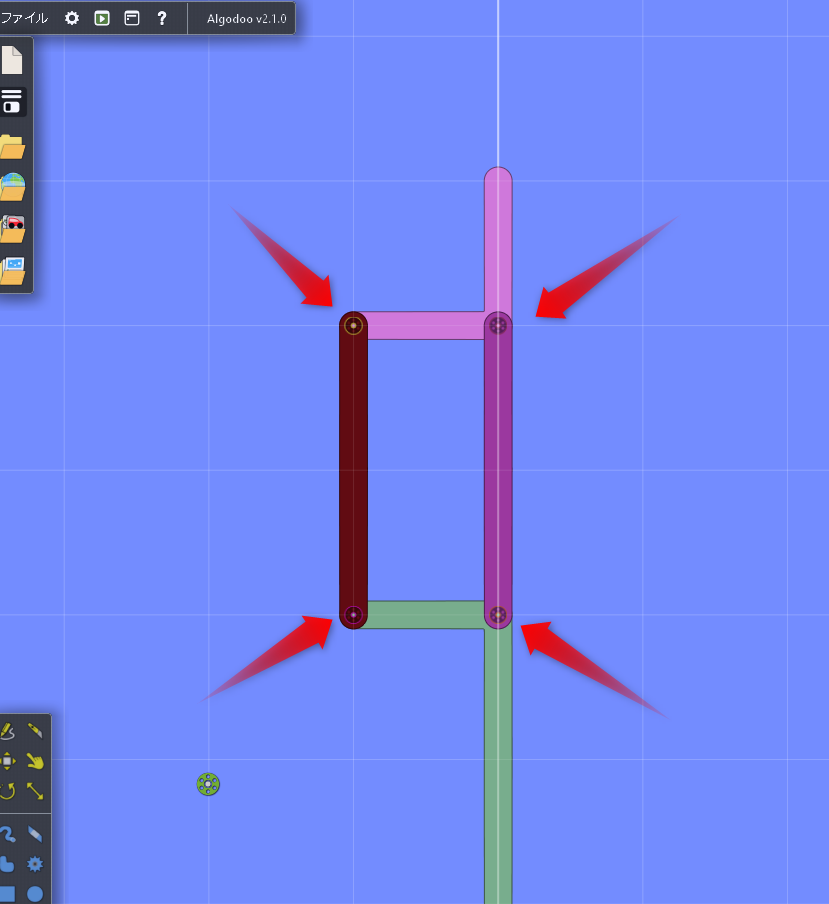
そして、ここをピンで固定します。(ピン:前後のオブジェクトを固定する。でも回転は出来る)
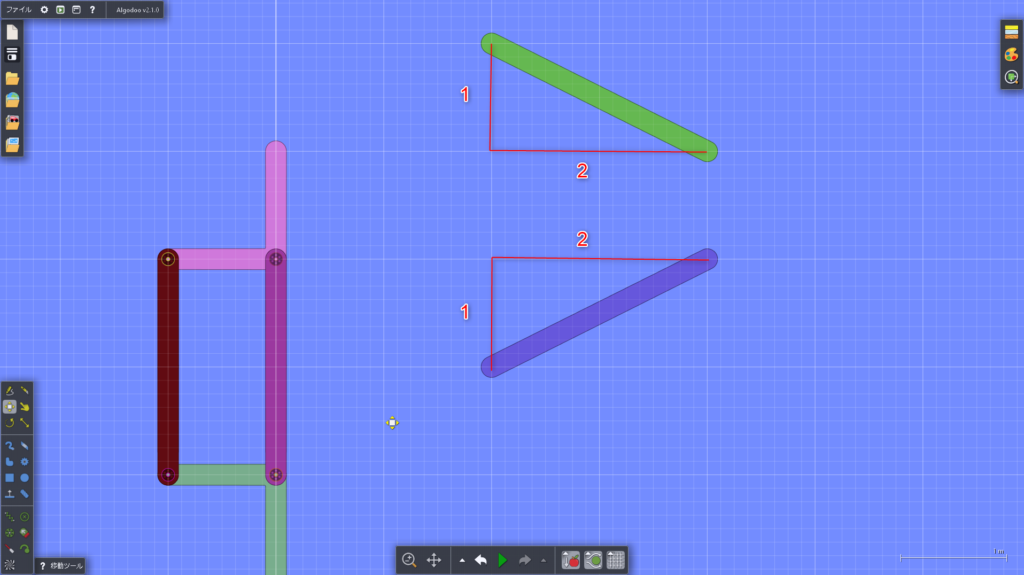
さらに「高さ1、底辺2の三角形の斜辺の棒」を2つ、こんな感じ↓で作ります
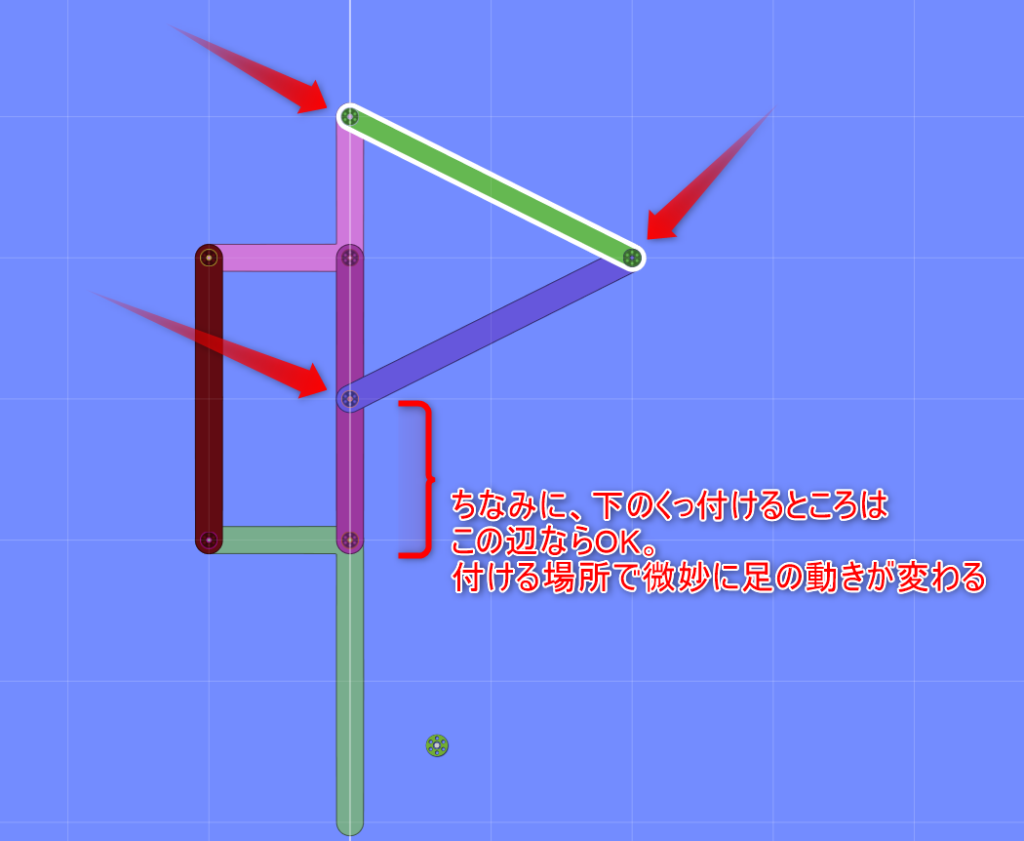
そして、こういう感じでピンでとめます。
ちなみに、下のピンの位置は付ける場所を変えてもOKです。微妙に足の動き方が変わります。
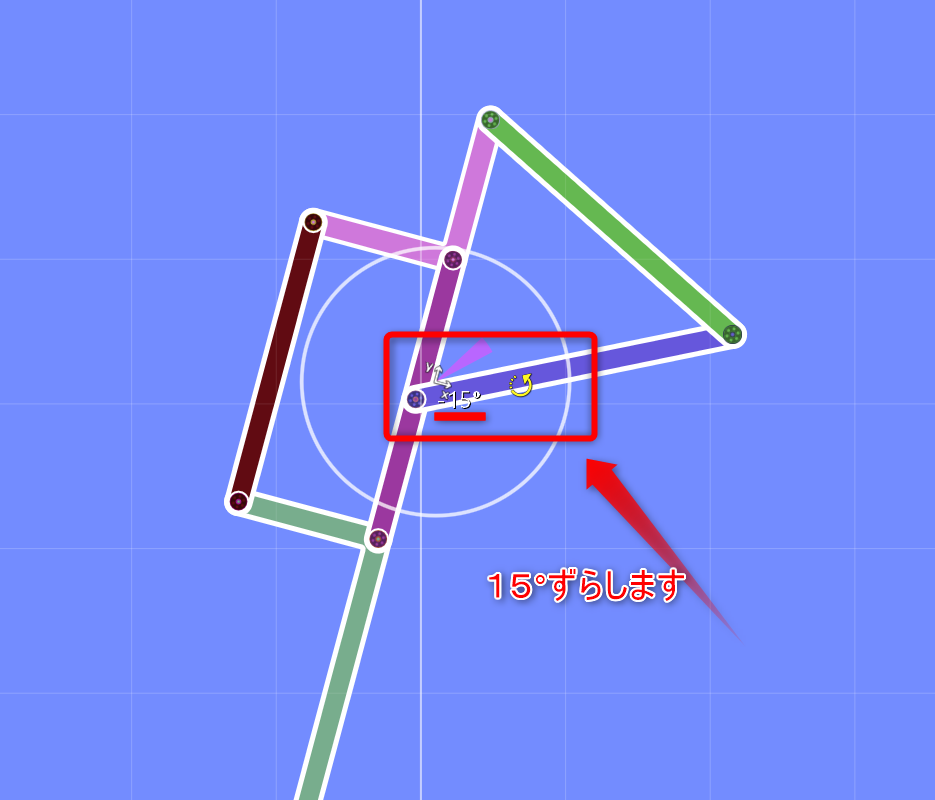
全体的に15°ずらします
クローン(複製)して鏡面でひっくり返します
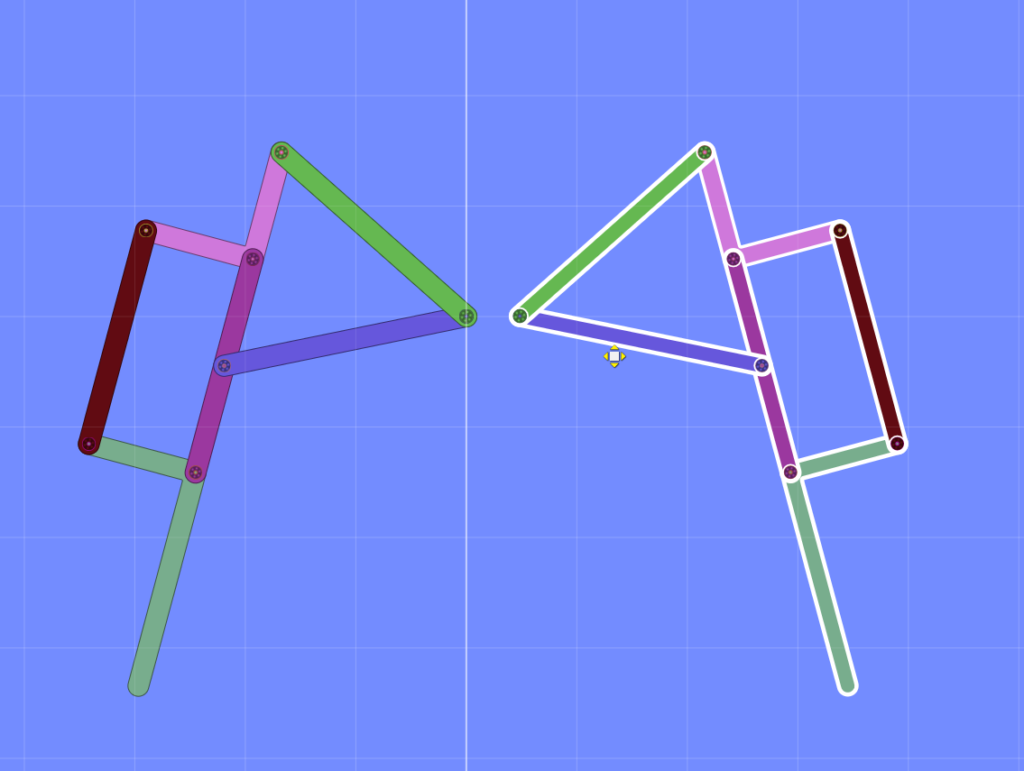
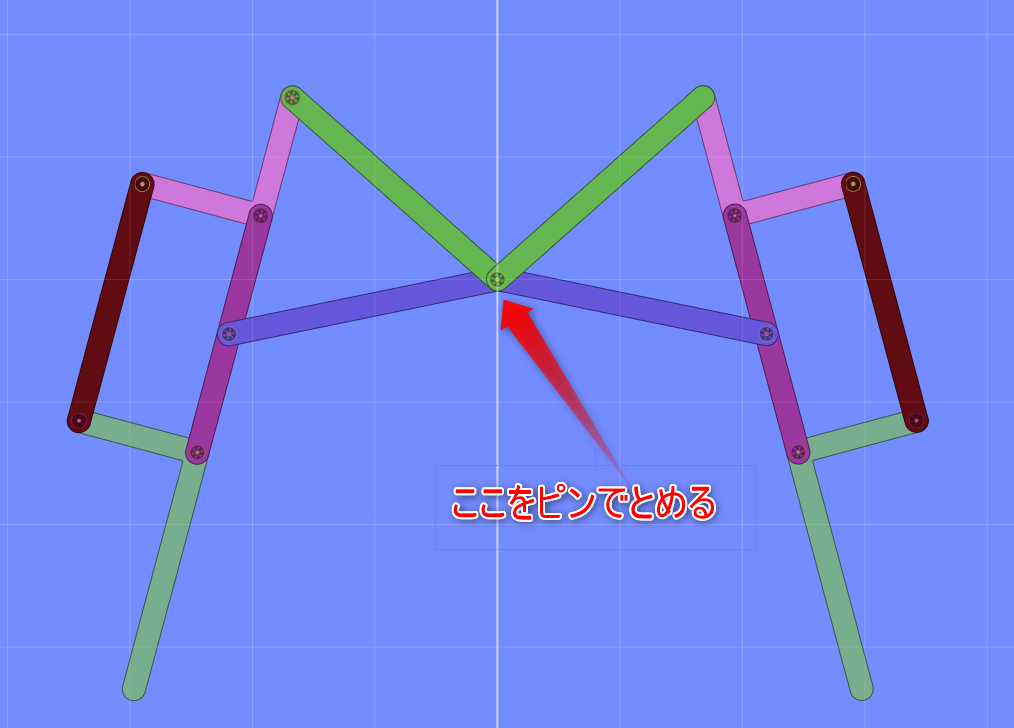
そして、三角の先端を合わせるようにして、ピンでとめます。
(Algodooでこの操作をするには、緑の棒の片側を「前面」にしてからピンでとめます。そうしないと、既存のピンを選択してしまってピンが打てないので注意)
下の図のようにブリッジを架けます。ここ重要!
ピンクのL字のエルボーを連結させてピンで止めます。
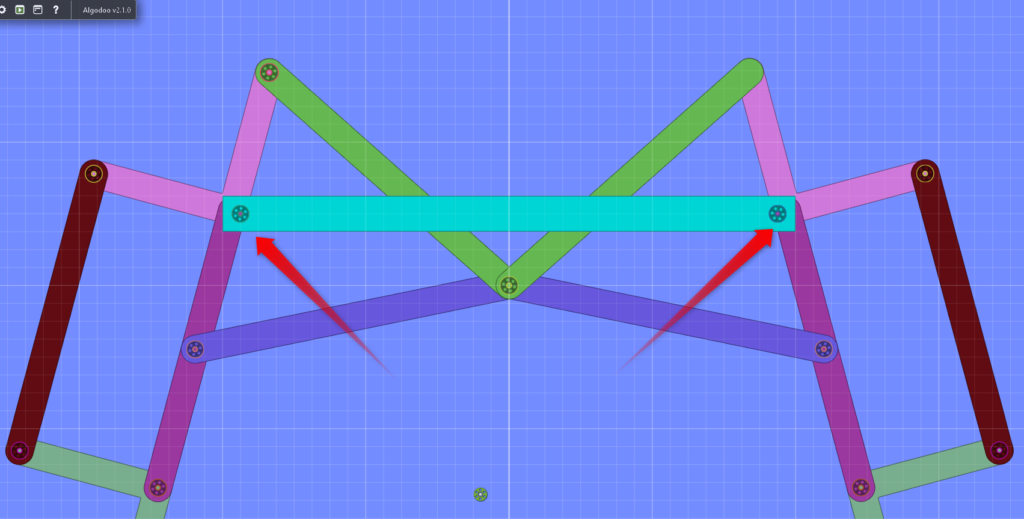
ブリッジの真ん中に丸を付けます。こいつを回します。
後ろの足と足の中央の部分をピンで止めます。
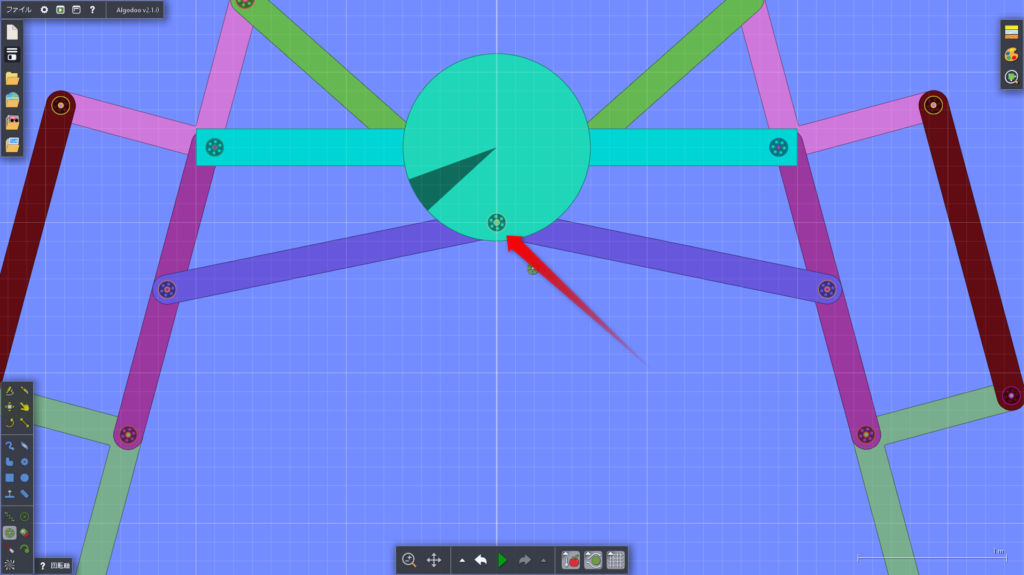
あとは、中央をモータにすると出来上がり!!
この気持ち悪いくらい生物的な動き!!😆👍ヨシ!!
長さを変えてみたりして、自分だけのMyテオヤンセン機構を作ってみてね
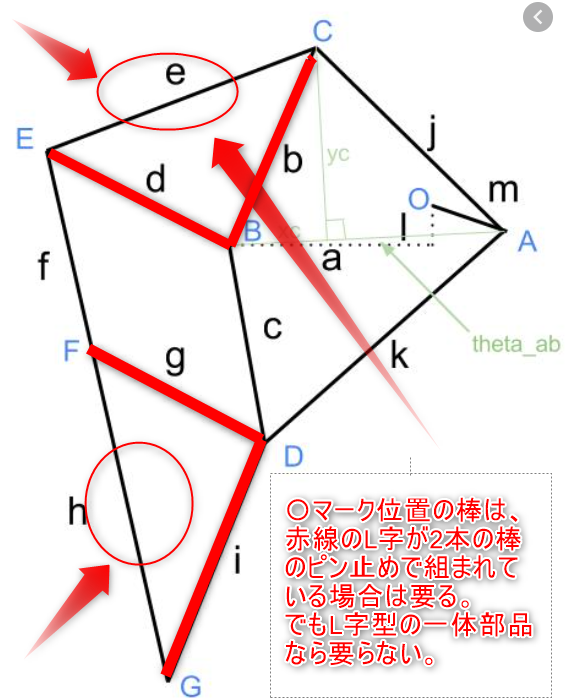
ちなみに、ネットで「テオヤンセン機構」で検索すると、結構難しい図が出てくると思います。
この難しさの原因は下図の斜めの棒だと思っています。
〇マークの部分の棒は赤線のL字が2本の棒がピンで繋がっている場合は要りますが、今回のようにL字の一体型パーツなら要りません。
4本足にすると、平面の中では動けます
この足をコピーし、回転角を180°ずらして合体すると、4本足になります
4本足だと、歩きます😆👍
ただし、2DのシミュレータであるAlgodooでは2本足で歩けますが、3D空間である現実世界では4本足だと手前方向に倒れちゃいます。
そこで、現実世界で歩かせる場合は、回転角を120°ずらした6本足なら歩けますよ
3Dプリンタで作れるぞ
Thingiverseでテオヤンセン機構のモデルがダウンロードできます!!
↓ここ
https://www.thingiverse.com/thing:56542
ただし、作ってみようとしたら結構難しかったですw
2021年は山梨でテオヤンセン展があるらしい
2021年4月24日(土)〜2021年6月22日(火)に、山梨県立美術館で、テオヤンセン展が行われるらしいです。
羨ましい。近かったら行ったんだけどな~🙄
2020年は神戸で開催予定だったんですが、コロナで取りやめになっちゃったんです。🤮ガハー
↓こちらがリンク
https://www.artagenda.jp/exhibition/detail/5560
以上
今日はテオヤンセン機構の紹介でした~
生物みたいに動くのでとても好きな機構です。どうやってテオヤンセンさんは思いついたんだろう。。。🙄
ではまた来週~
🦅バサバサ~
