くのへスタジオ
くのへスタジオ 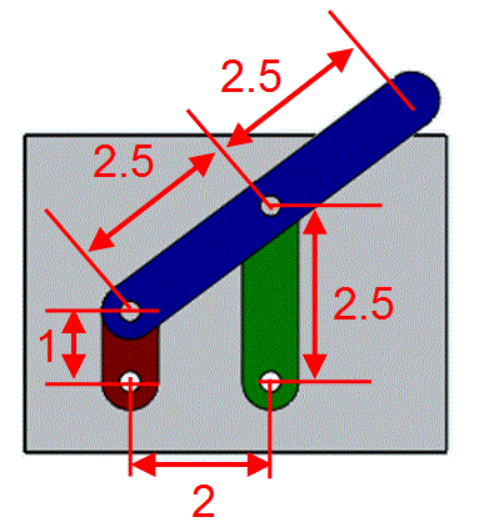
こんにちは、くのへ@MasazaneKunoheです。
金曜日のIT/電子工作DIYシリーズ。
ここ数週間、ずっとトランジスタ回路を使った電子工作の投稿ばかりしていたので、ちょっと嗜好を変えてロボット工作に必須の「リンク機構」をちょっと紹介していこうと思います。
今日はその道の人(?)にはかなり有名な「チェビシェフリンク機構」です。
チェビシェフリンク機構とは
人の足の動きみたいな軌跡を作れるリンク機構です。
まあ、まずは↓これを見てください。
これすごくない?
マジで人が歩いているように見える👀
この動きを実現しているのがチェビシェフリンク機構です。
何と、単純な回転運動が足の動きに変換されてるんです!!
作り方
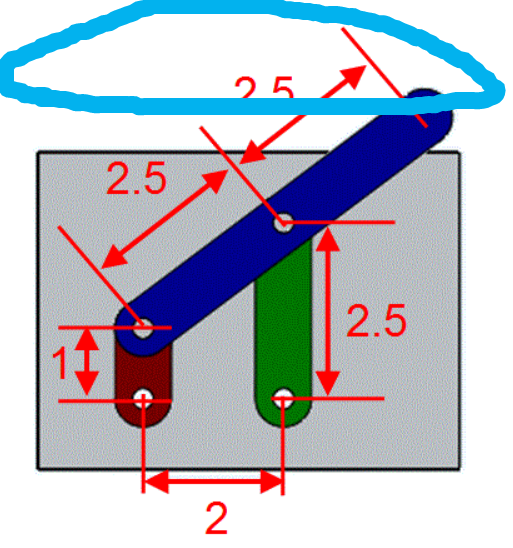
チェビシェフリンク機構はこの寸法関係で3つの棒をくっ付けると出来上がりです!!
超シンプル!!😃
(でも、なるほどわからん!だw)
ちょっと解説
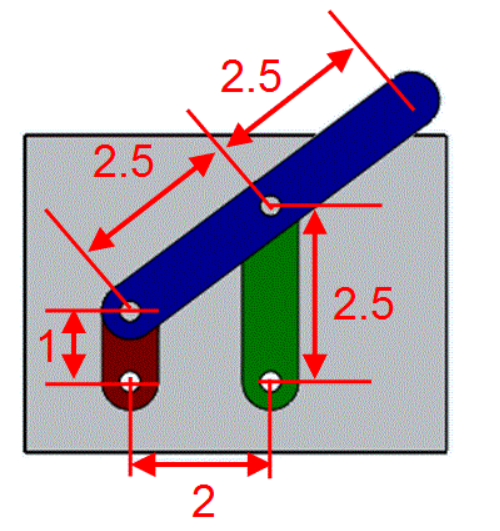
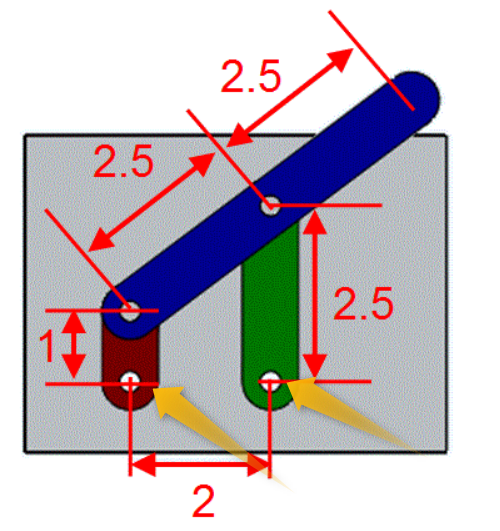
この下の2か所を動かない様に固定します。
ただし、棒がこの点を中心に回転できるようにします。
上の2か所の青い棒の上の丸い点は、下の赤い棒と緑の棒とくっついている部分です。
ただし、それぞれの回転は自由に出来るようにしています。
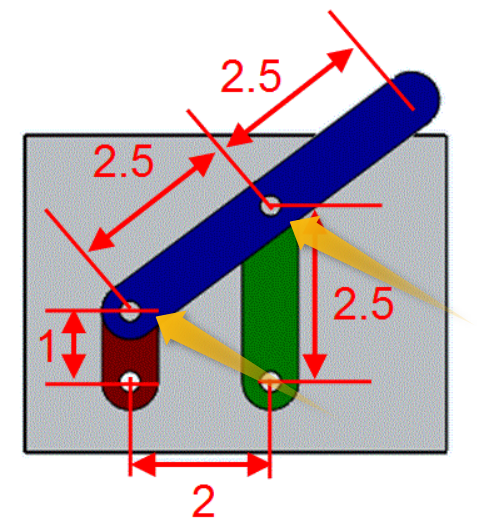
そして、この赤い棒を回転運動させます。
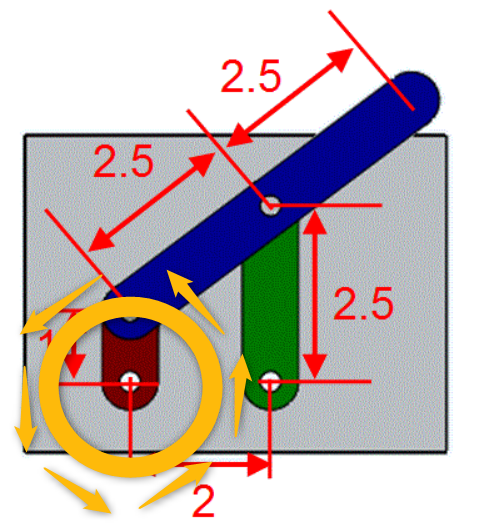
すると、青い棒の先端が↓こんな感じの軌跡を描くんです
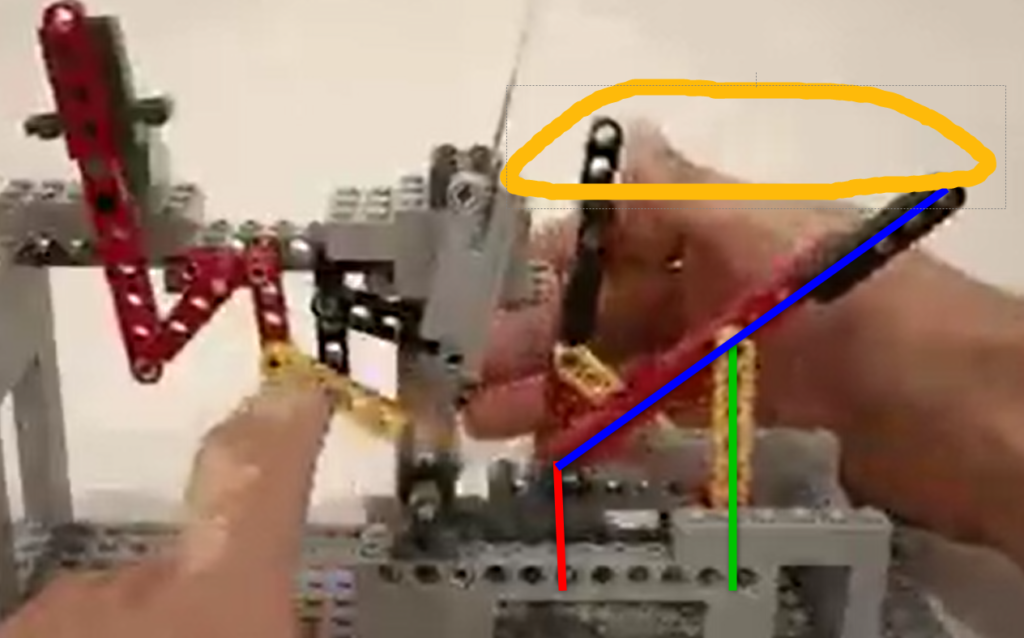
先ほどの動画の中身の部分にチェビシェフリンク機構発見
これが上の動画の14秒目です。
ここにチェビシェフリンクが使われています。
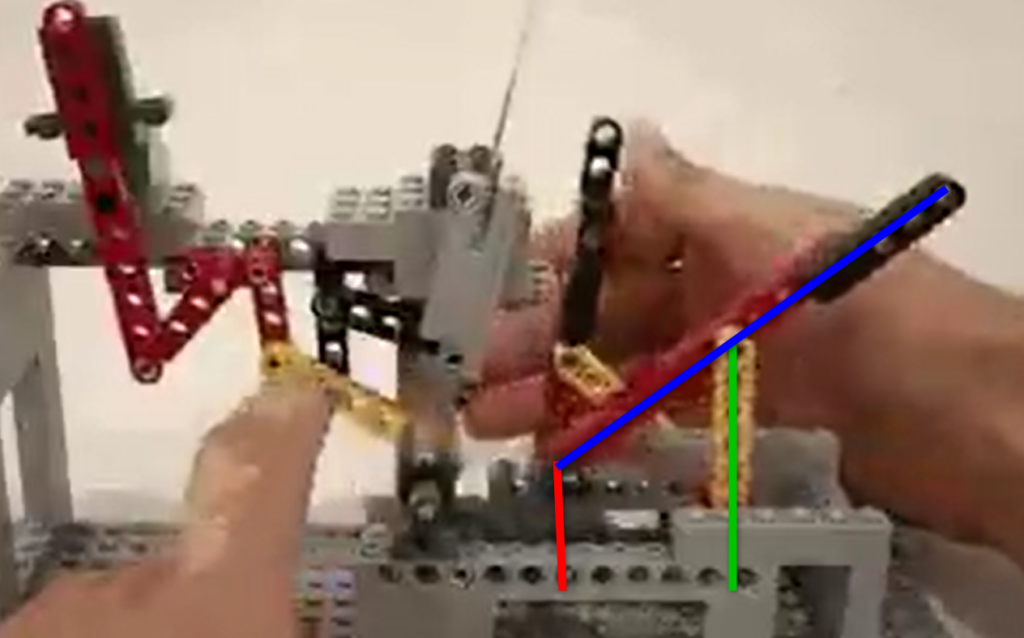
赤い棒が回転運動すると、↓このオレンジのような軌跡を描きます。
これを足の先端にくっ付けると、歩いているように見えるんだね!!😃
Algodooでシミュレートだ!
Algodooでシミュレートしました。
すごくいい感じ!!
でも、人を歩かせるのは結構バランスが難しかったですw
以上
今日はチェビシェフリンク機構の紹介でした~
リンク機構って面白いなぁ。
ロボット作りはリンク機構の勉強が絶対必要ですが、まずはチェビシェフリンク機構かな~と思います😊
ではまた来週~
🦅バサバサ~